Using an RTK GPS
Introduction
Position information can be critical for achieving high accuracy localization and one way to get this information is through the use of a GPS. It is possible to put a GPS only on the robot, but to get the centimeter level accuracy provided by RTK GPS systems a base station is required to send corrections to the GPS on the robot. What follows is a series of notes and lessons learned from working with a GPS system.
Notes and Lessons Learned:
- GPS Board
- https://www.sparkfun.com/products/15136
- Robot and base station boards should match
- GPS Antenna
- https://www.sparkfun.com/products/15192
- One of these for each the robot and the base station
- There are other similar ones available that are cheaper if budget is a concern
- Both antenna should have unobstructed open sky above them and ideally have buildings well off to the side of them
- Antennas should be on large flat metal surfaces away from the ground such as a car roof
- Aluminum foil might provide enough shielding on your robot with around a square foot of area below the antenna
- The metal shields the antennas from signals bouncing up off the ground
- Software
- U-center software - https://www.u-blox.com/en/product/u-center
- Will need to figure out how to connect the base station and robot GPS over radio
- Whip antenna for the radio
- Should be parallel ideally
- GPS signal strength
- You should be able to get 3D/DGNSS/FIXED with a few bars in the 30s and 40s dB range at the same time
- FIXED has a 2 cm uncertainty
- Connect to the GPS by
- Plugging the USB into your computer
- Receiver > Connection > COMX (on Windows for example)
Key Issues and how to solve them
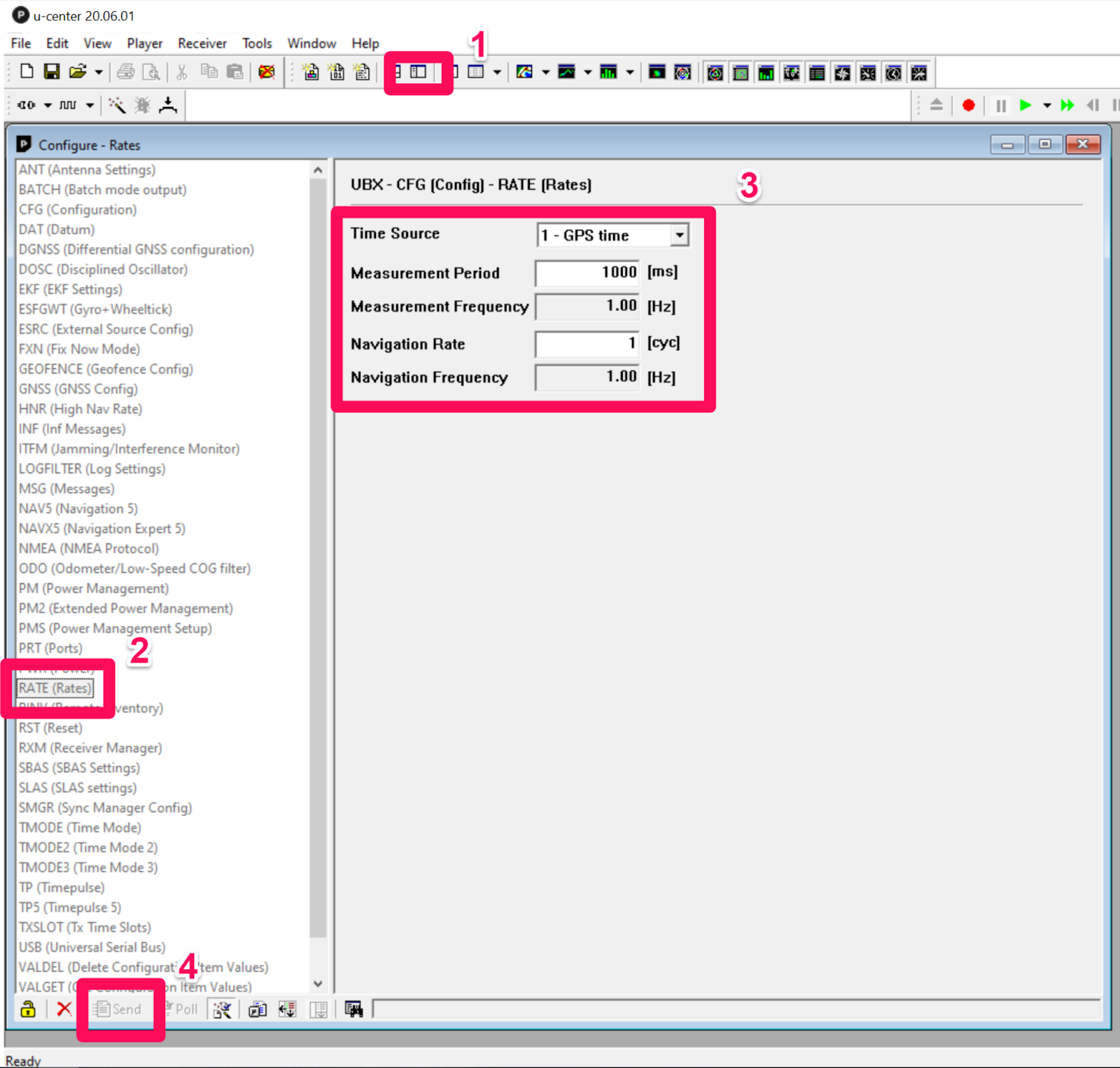
- Setting the frame rate for the GPS
- Only should need to change the Measurement Period
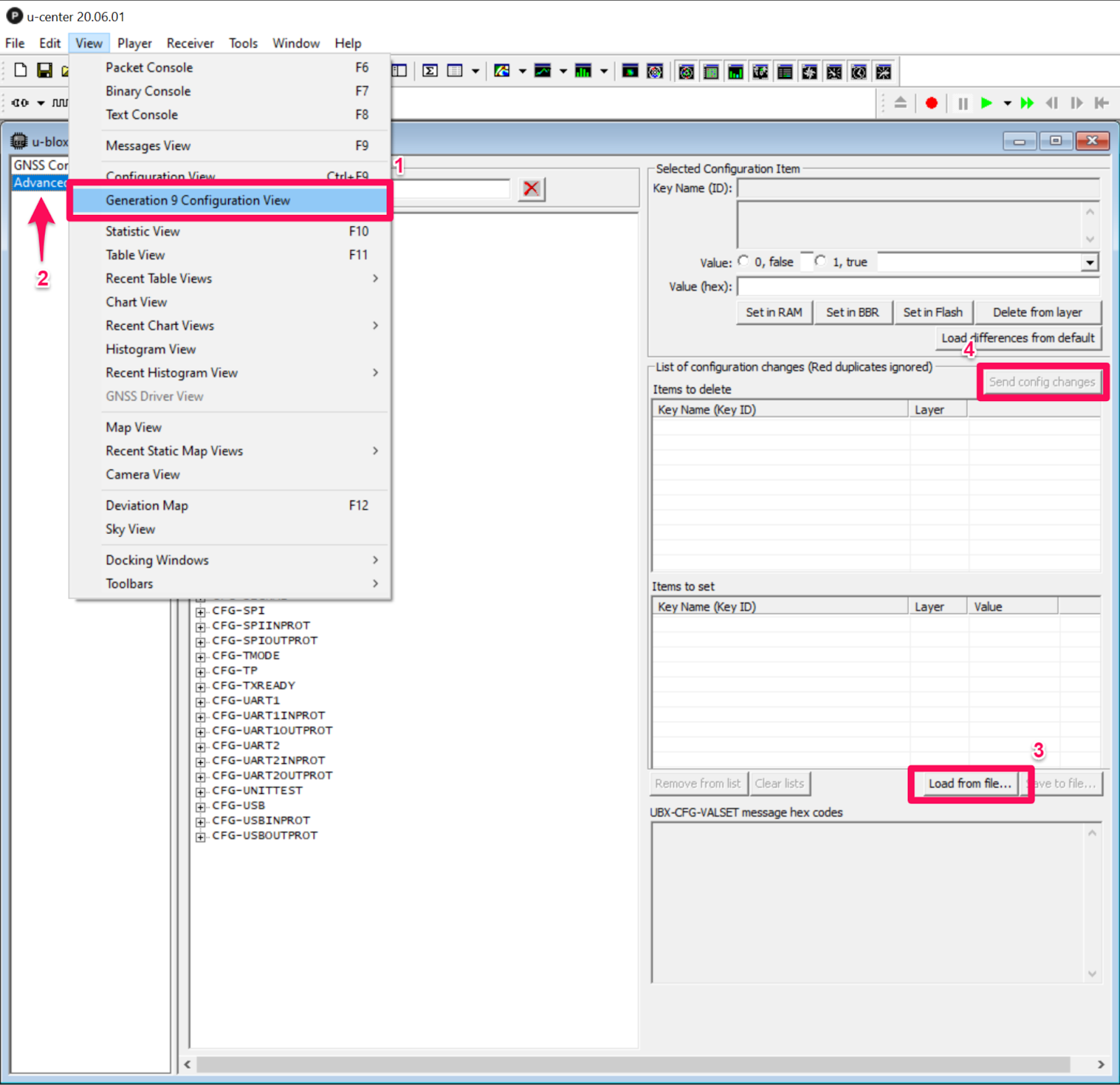
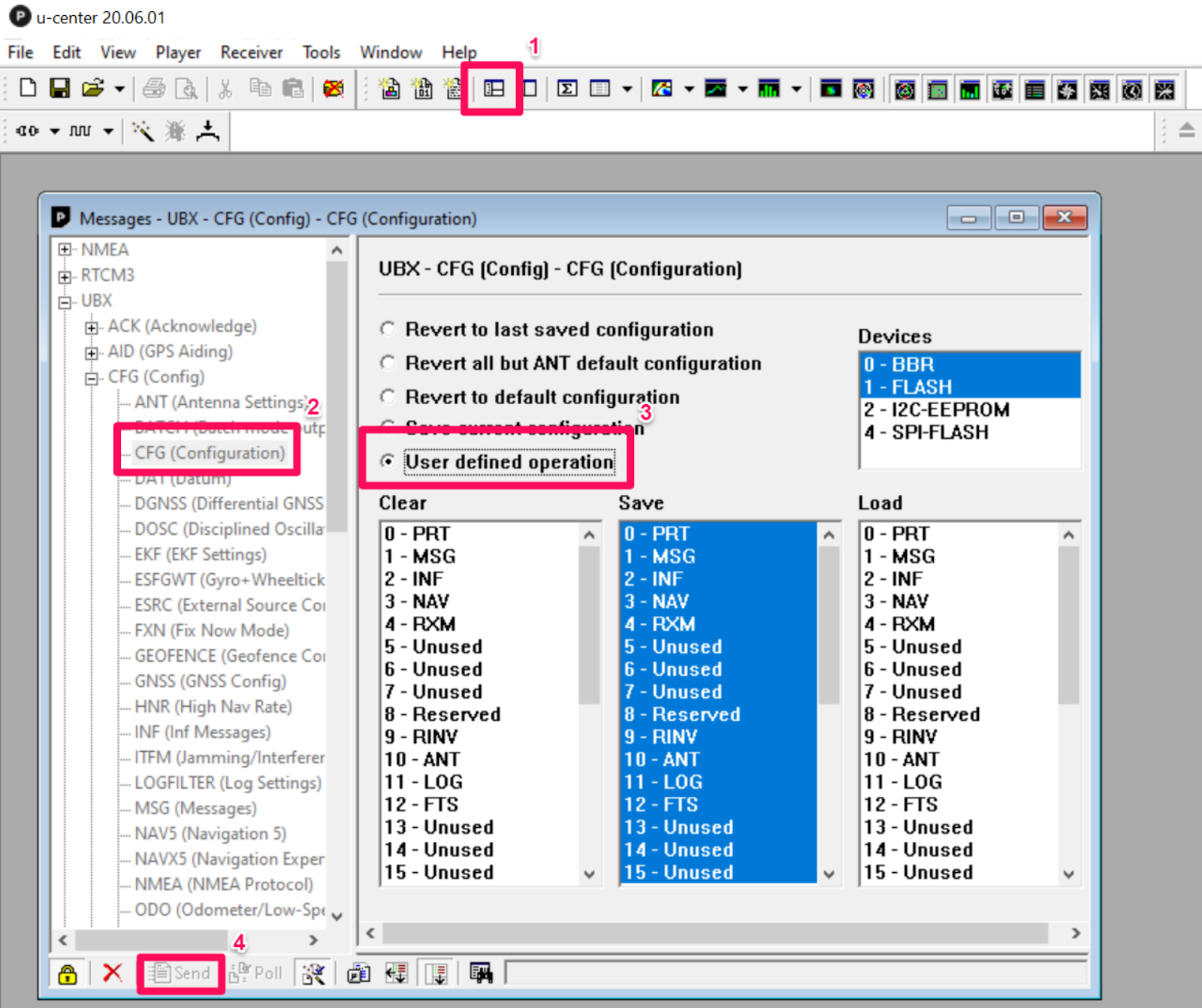
- Making the settings permanent on the GPS
- Poor connection between the base station and robot GPS
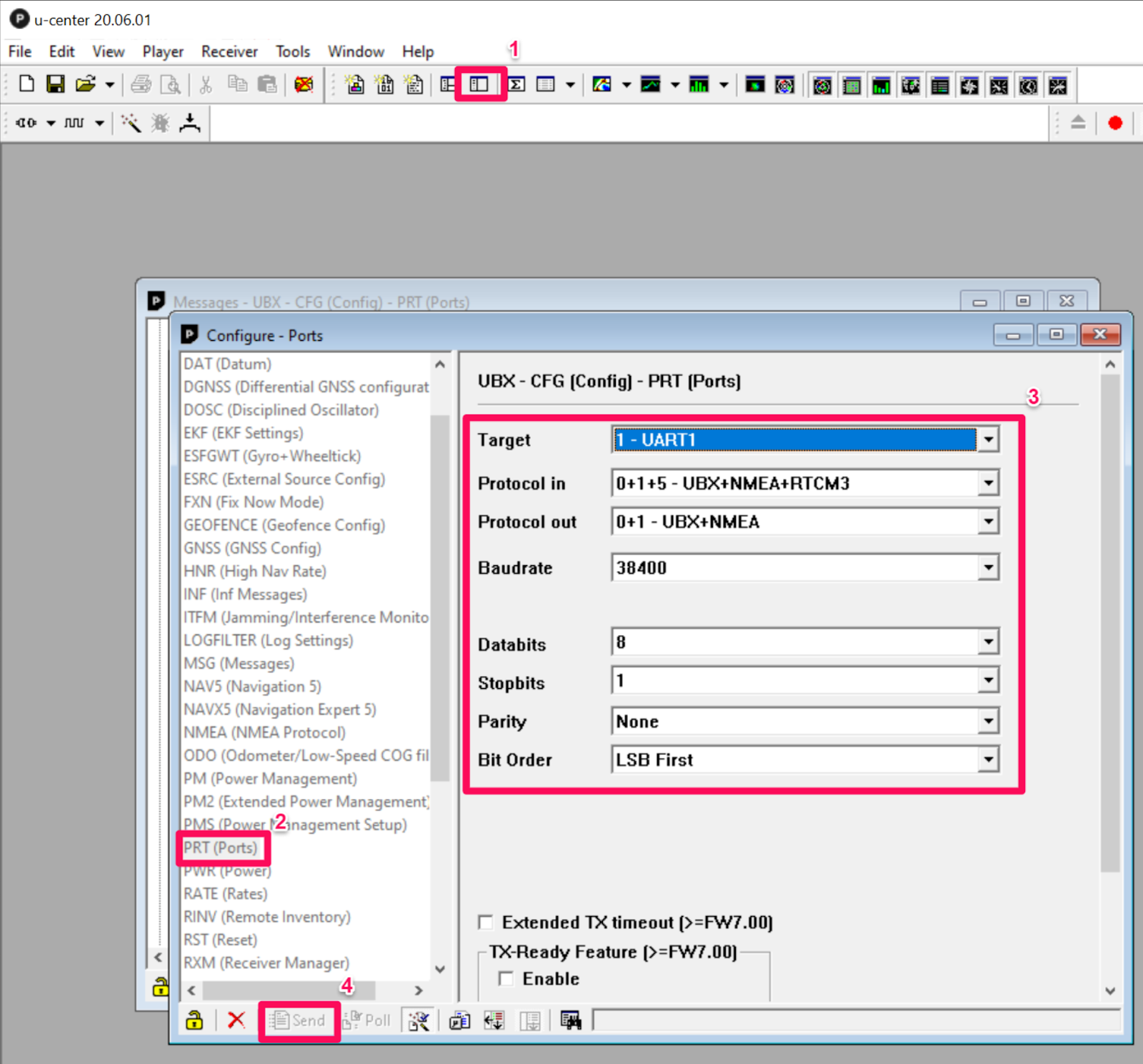
-
Make sure that all the values match between the base station and robot GPS except for the target - robot should be UART2 and the base station UART1
-
Loading a configuration file (You may not need to do this)