Framework GUI for robotic system using ROS
PyQt is an easy to implement user interface that can be integrated with ROS. It is customizable and can be deployed on multiple platforms. This documentation provides a basic GUI framework that all robotic systems using ROS can use and build upon.
Requirements
-
This application assumes your workspace has ROS installed. If not, use this link for installing ROS.
-
This application can be used on any Operating System including Linux, Windows and Mac.
-
This application can be used with ROS1 and ROS2.
Installation
To use PyQt5, open a terminal and type the following command
$ pip install PyQt5
Overview of Final Application
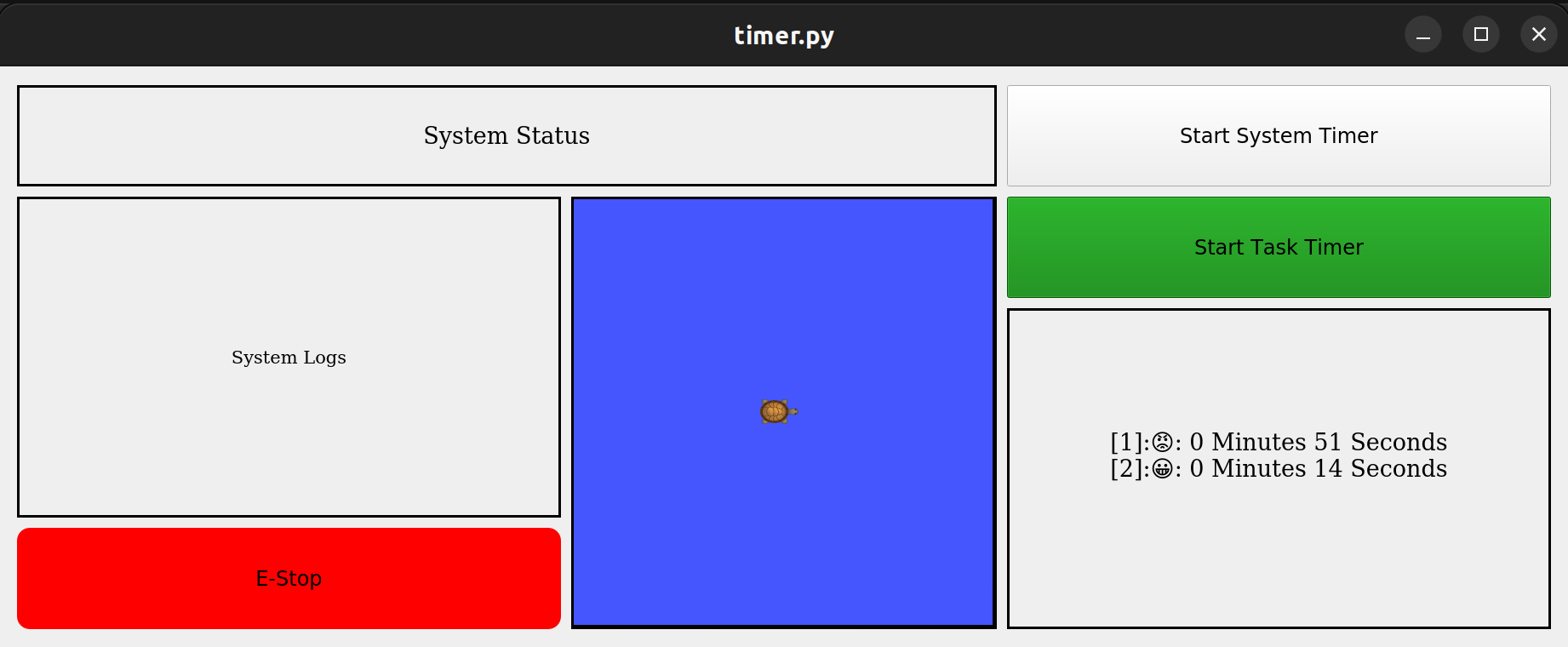
This is the final application you can get by following this tutorial. Blocks that require customization will be explained in the documentation.
Application Walkthrough
Timers
The application has two timers
-
System level timer: allows you to keep track of your entire system’s operation time.
-
Task level timer: allows you to keep track of a specific task’s operation time.
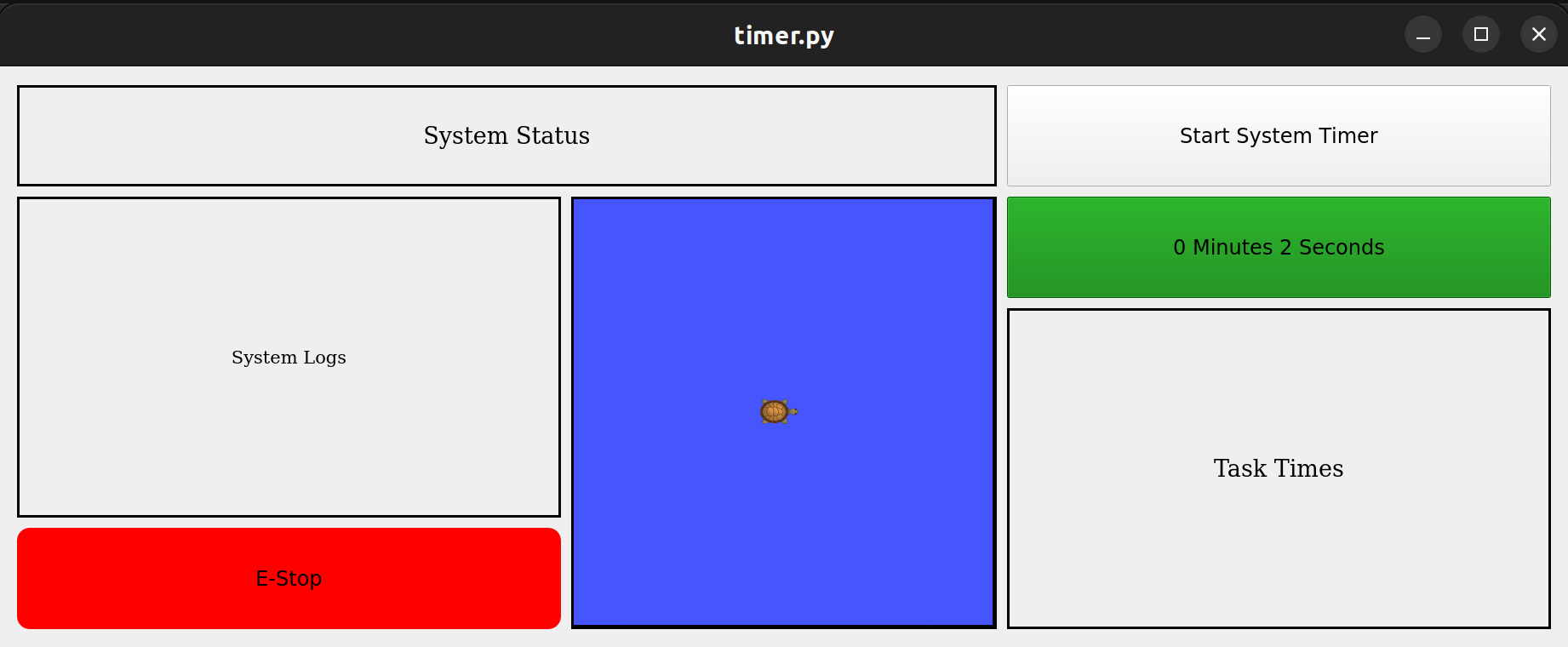
System Level Timer
The system level timer captures the time taken between the start and the end of your system. This can be done by pressing the ‘Start System Timer’ button. Clicking it once begins the timer and clicking it again stops the timer. The color of the timer will change based on the ` color_change_times ` and ` color_change_colors` defined in the full code at the bottom of this tutorial. This can be modified to suit your system’s requirements.
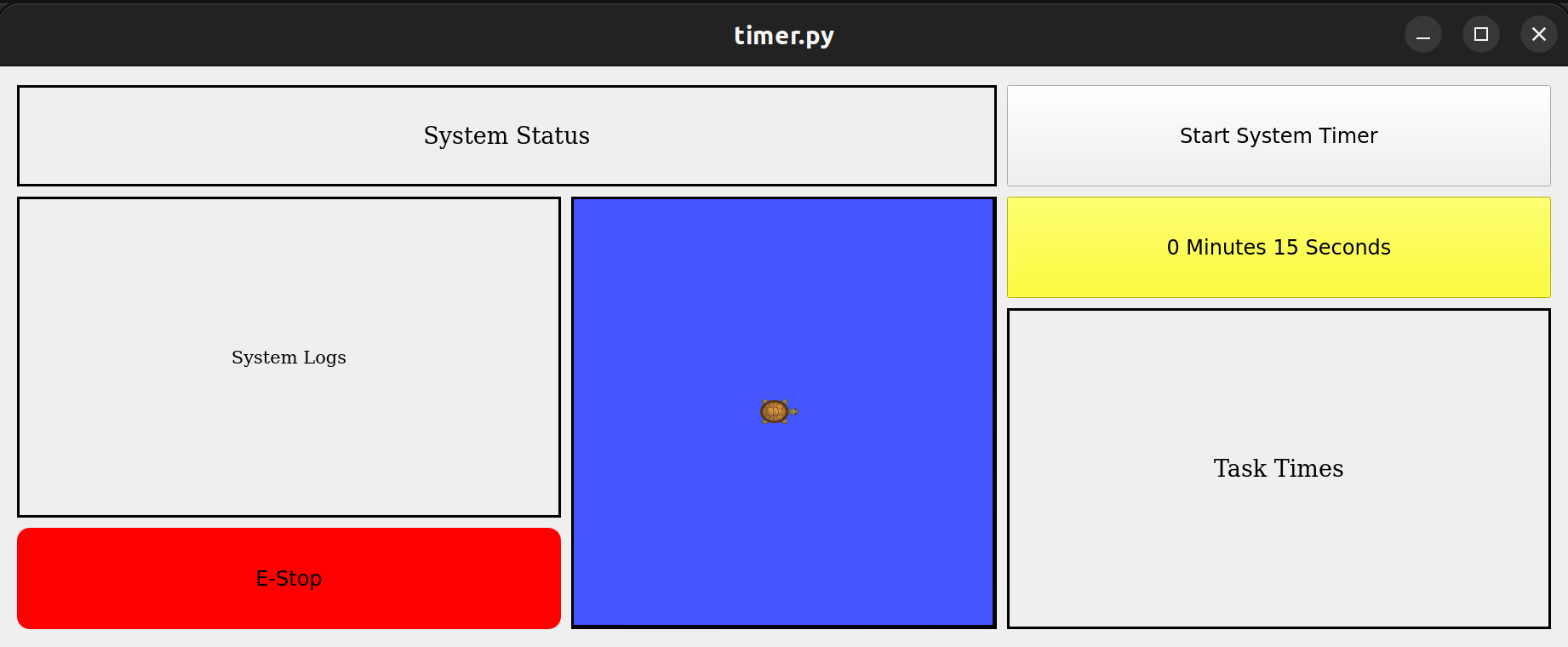
The color change for the timers are as follows:
Green Button
 Yellow Button
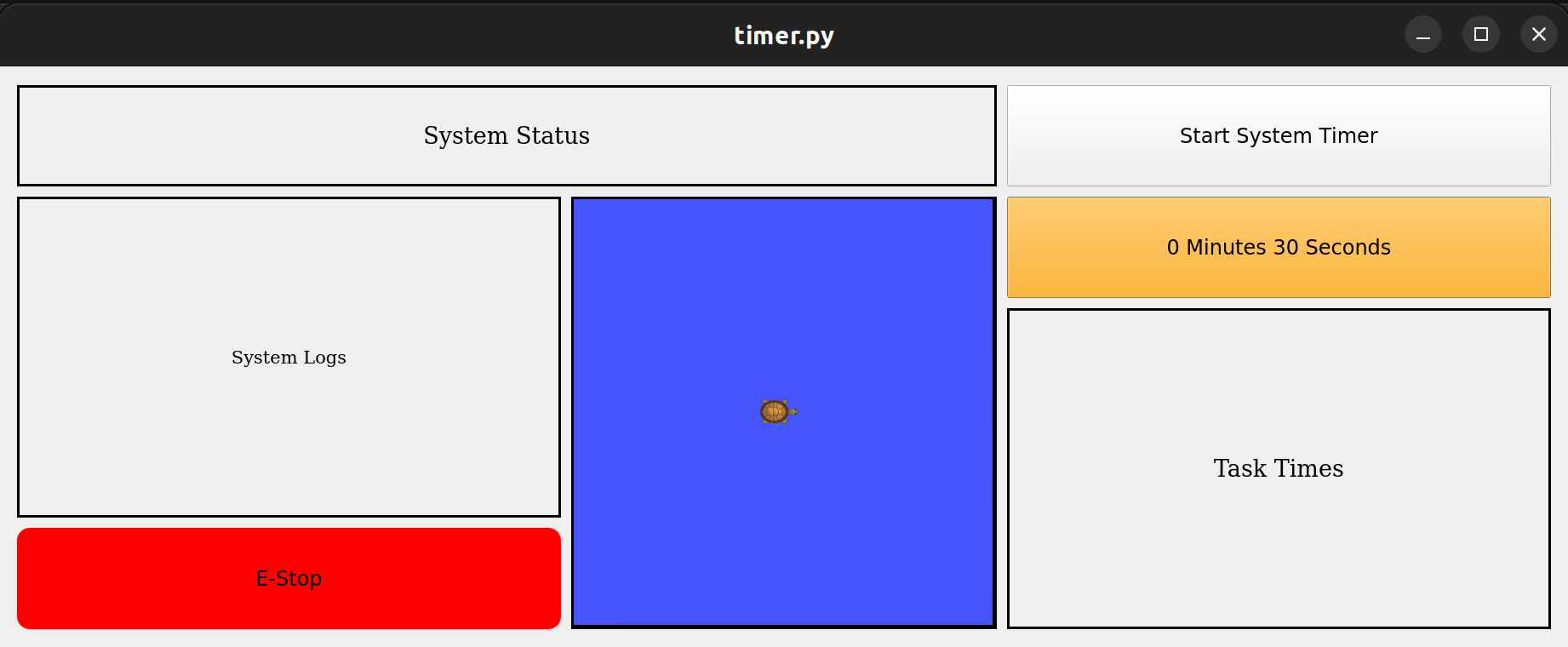
Yellow Button
 Orange Button
Orange Button
 Red Button
Red Button

The code block for this is given here:
def SystemTimerBlock(self):
self.system_count = 0
self.system_start = False
self.system_end = False
self.system_timer_button = QPushButton("Start System Timer", self)
self.system_timer_button.setFixedSize(self.win.frameGeometry().width(),self.win.frameGeometry().height()//4)
self.grid.addWidget(self.system_timer_button, 0, 2)
self.system_timer_button.clicked.connect(self.system_timer_controller)
system_timer = QTimer(self)
system_timer.timeout.connect(self.system_timer)
system_timer.start(1000) # modify to match system needs
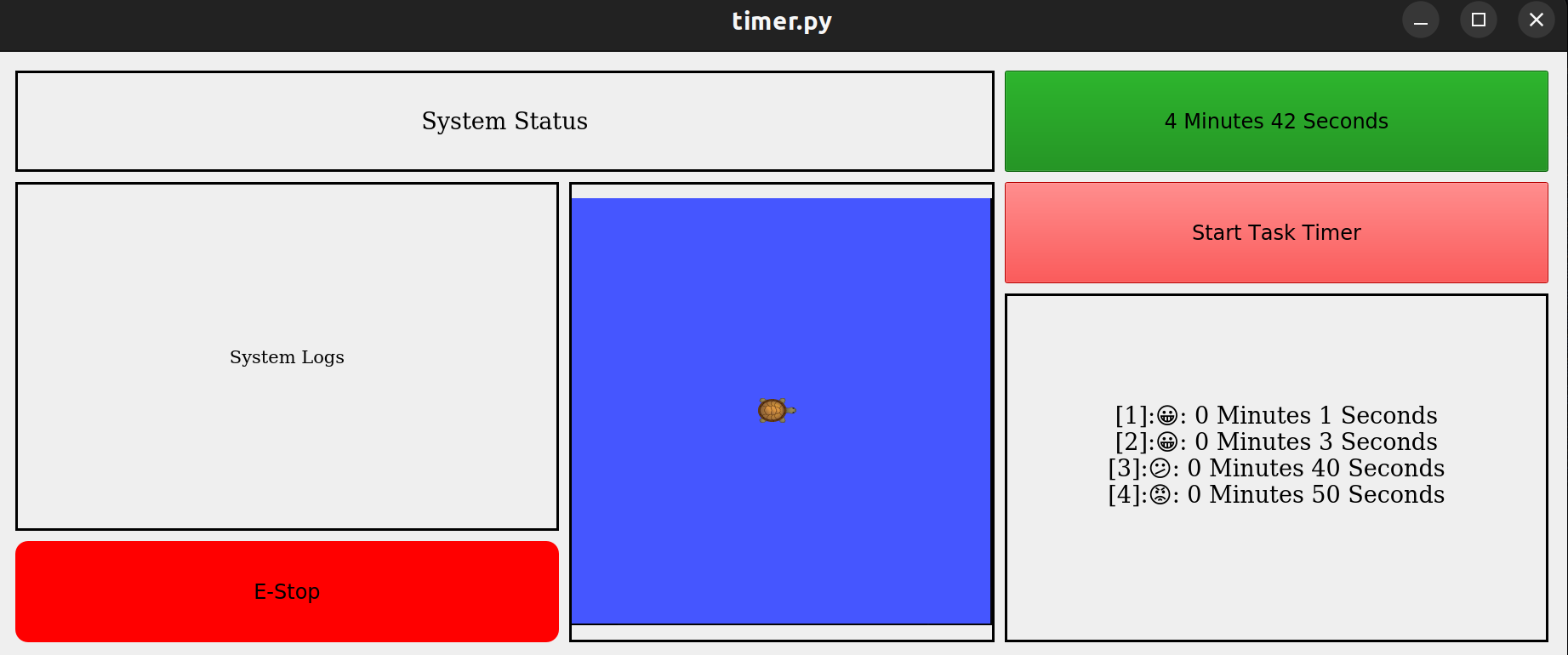
Task Level Timer
The task level timer captures the time taken between the start and the end of one task. This can be done by pressing the ‘Start Task Timer’ button. This button also changes color when the time taken to perform a task is reaching the total allowed time.
One additional feature of the task level timer is it saves the task logs. These are outputted in the Task Times block that is directly below the button.
def TaskTimerBlock(self):
self.task_times = {}
self.task_count = 0
self.task_start = False
self.task_end = False
self.task_timer_button = QPushButton("Start Task Timer", self)
self.task_timer_button.setFixedSize(self.win.frameGeometry().width(),self.win.frameGeometry().height()//4)
self.grid.addWidget(self.task_timer_button, 1, 2)
self.task_timer_button.clicked.connect(self.task_timer_controller)
task_timer = QTimer(self)
task_timer.timeout.connect(self.task_timer)
task_timer.start(1000) # modify to match system needs
self.task_times_label = QLabel("Task Times", self)
self.grid.addWidget(self.task_times_label, 2, 2, 2, 1)
self.task_times_label.setStyleSheet("border : 3px solid black")
self.task_times_label.setFont(QFont('Times', 10))
self.task_times_label.setAlignment(Qt.AlignCenter)
E-Stop Button
The E-Stop button is a ROS publisher that will publish to a topic which can then be used by your system’s code to stop the robot.
You need to change the following code
self.estop_pub = rospy.Publisher('/mrsd/estop', Bool, queue_size=10)
and customize it for your system. Your ROS system’s main code should have an e-stop subscriber that will shut down the entire system once the button is pressed.
System Status
The system status block subscribes to the following topic.
self.status_sub = rospy.Subscriber('/mrsd/status', String, self.status_callback)
Thus your main system should publish to a /mrsd/status topic. Ideally, your state machine will have a topic publisher that this application can subscribe to.
System Log
This block is left for you to customize and display any other useful information. It subscribes to
self.system_log_sub = rospy.Subscriber('/mrsd/system_log', String, self.system_log_callback)
and you need to add some code to format the output. For example, this section could be used to display some of these information
- How many peppers you have harvested
- How many people you have saved
- What process are up next
Visualization Block
The visualization block can be used to display any results visually. Use cases can be
- Robot localization within the map
- 3D point clouds
- Object detection results
Entire code
pyqt-ros.py
``` # importing libraries from PyQt5.QtWidgets import * from PyQt5.QtGui import * from PyQt5.QtCore import * import sys, emoji, rospy from PyQt5.QtGui import QPixmap # system level requirements total_demo_time = 60*20 # assuming SVD is 20 minutes one_task_max = 60 # assuming each task is 60 seconds color_change_times = [0.25, 0.5, 0.75, 1.0] color_change_colors = ['green', 'yellow', 'orange', 'red'] gui_x, gui_y = 700, 600 class Window(QMainWindow): def __init__(self): super().__init__() self.setWindowTitle("Python ") self.win = QWidget() self.grid = QGridLayout() self.UiComponents() self.win.setLayout(self.grid) self.win.setGeometry(0, 0, gui_x, gui_y) self.win.show() # self.status_sub = rospy.Subscriber('/mrsd/status', String, self.status_callback) # self.estop_pub = rospy.Publisher('/mrsd/estop', Bool, queue_size=10) # self.system_log_sub = rospy.Subscriber('/mrsd/system_log', String, self.system_log_callback) def SystemTimerBlock(self): self.system_count = 0 self.system_start = False self.system_end = False self.system_timer_button = QPushButton("Start System Timer", self) self.system_timer_button.setFixedSize(self.win.frameGeometry().width(),self.win.frameGeometry().height()//4) self.grid.addWidget(self.system_timer_button, 0, 2) self.system_timer_button.clicked.connect(self.system_timer_controller) system_timer = QTimer(self) system_timer.timeout.connect(self.system_timer) system_timer.start(1000) # modify to match system needs def TaskTimerBlock(self): self.task_times = {} self.task_count = 0 self.task_start = False self.task_end = False self.task_timer_button = QPushButton("Start Task Timer", self) self.task_timer_button.setFixedSize(self.win.frameGeometry().width(),self.win.frameGeometry().height()//4) self.grid.addWidget(self.task_timer_button, 1, 2) self.task_timer_button.clicked.connect(self.task_timer_controller) task_timer = QTimer(self) task_timer.timeout.connect(self.task_timer) task_timer.start(1000) # modify to match system needs self.task_times_label = QLabel("Task Times", self) self.grid.addWidget(self.task_times_label, 2, 2, 2, 1) self.task_times_label.setStyleSheet("border : 3px solid black") self.task_times_label.setFont(QFont('Times', 10)) self.task_times_label.setAlignment(Qt.AlignCenter) def EStopBlock(self): self.estop_button = QPushButton("E-Stop", self) self.estop_button.setStyleSheet("background-color: red; border-radius: 15px") self.estop_button.setFixedWidth(self.win.frameGeometry().width()) self.estop_button.setFixedHeight(self.win.frameGeometry().height()//4) self.grid.addWidget(self.estop_button, 3, 0, 1, 1) self.estop_button.clicked.connect(self.estop_button_clicked) def SystemLogsBlock(self): self.system_logs = QLabel("System Logs", self) self.grid.addWidget(self.system_logs, 1, 0, 2, 1) self.system_logs.setStyleSheet("border : 3px solid black") self.system_logs.setFont(QFont('Times', 8)) self.system_logs.setAlignment(Qt.AlignCenter) def VisualizationBlock(self): self.pixmap = QPixmap('turtlesim.png') self.image_label = QLabel(self) self.image_label.setPixmap(self.pixmap) self.image_label.setStyleSheet("border : 3px solid black") self.grid.addWidget(self.image_label, 1, 1, 3, 1) def SystemStatusBlock(self): self.system_status = QLabel("System Status", self) self.system_status.setStyleSheet("border : 3px solid black") self.system_status.setFont(QFont('Times', 10)) self.system_status.setAlignment(Qt.AlignCenter) self.grid.addWidget(self.system_status, 0, 0, 1, 2) def UiComponents(self): self.SystemTimerBlock() self.TaskTimerBlock() self.EStopBlock() self.SystemLogsBlock() self.VisualizationBlock() self.SystemStatusBlock() def format_time(self, seconds): return f'{seconds // 60} Minutes {seconds % 60} Seconds' def change_system_color(self): if self.system_count/total_demo_time < color_change_times[0]: color = color_change_colors[0] elif self.system_count/total_demo_time < color_change_times[1]: color = color_change_colors[1] elif self.system_count/total_demo_time < color_change_times[2]: color = color_change_colors[2] else: color = color_change_colors[3] self.system_timer_button.setStyleSheet(f"background-color: {color}") def system_timer(self): if self.system_start == True: self.system_count += 1 text = self.format_time(self.system_count) self.system_timer_button.setText(text) self.change_system_color() if self.system_end == True: self.system_start = False self.system_end = False def system_timer_controller(self): if self.system_start == False: self.system_start = True self.system_end = False else: self.system_start = False self.system_end = True self.system_timer_button.setText("Start System Timer") def change_task_color(self): if self.task_count/one_task_max < color_change_times[0]: color = color_change_colors[0] emoji = '😀' elif self.task_count/one_task_max < color_change_times[1]: color = color_change_colors[1] emoji = '😐' elif self.task_count/one_task_max < color_change_times[2]: color = color_change_colors[2] emoji = '😕' else: color = color_change_colors[3] emoji = '😡' self.task_timer_button.setStyleSheet(f"background-color: {color}") return emoji def task_timer(self): if self.task_start == True: self.task_count += 1 text = self.format_time(self.task_count) self.task_timer_button.setText(text) self.change_task_color() if self.task_end == True: self.task_start = False self.task_end = False self.task_times[len(self.task_times)] = (self.task_count, self.change_task_color()) self.task_count = 0 self.task_times_label.setText(self.timer_label_format()) def task_timer_controller(self): if self.task_start == False: self.task_start = True self.task_end = False else: self.task_start = False self.task_end = True self.task_timer_button.setText("Start Task Timer") def timer_label_format(self): text = "" for i in range(len(self.task_times)): text += f"[{i+1}]:{self.task_times[i][1]}: {self.format_time(self.task_times[i][0])}\n" return text def estop_button_clicked(self): print("estop clicked") # self.estop_pub.publish(True) def status_callback(self, msg): # updates the system status when status information is received if msg.data != '': self.system_status_label.setText(msg.data) def system_output_callback(self, msg): # updates the system output when system information is received # should modify to display the system output in a more readable format for each team if msg.data != '': self.system_logs.setText(msg.data) App = QApplication(sys.argv) window = Window() sys.exit(App.exec()) ```Summary
This article provides a walkthrough of basic code that uses PyQt5 for development of a GUI that is integrated with ROS. It highlights parts that need to be modified in your system level ROS code as well as suggests possible modifications.